Introduction
Wifi Robot: A remote control car that can be driven over the internet or with a laptop wirelessly from up to 500m away. It has a live-feed network camera so that it can be driven without line of sight and a horn so that you can honk at people.
A while ago I discovered the Linksys WRT54GL router. It's very hacker-friendly in that it runs Linux and some of the hardware has been reverse engineered. A bunch of alternative firmware versions have been written for this router. The version that this project uses is the customizable Linux firmware Open-WRT. Along with great software for this router, a bunch of hardware hacks are possible. With a cheap, hackable, embedded Linux system at my disposal -- I knew I had to do something cool with it. So the Wifi Robot idea was born.
The goal of this article is to give a high-level overview of the project and provide some implementation details of the software and electronics. It is not meant to be a step-by-step how-to guide, but there should be enough information for someone with motivation and some background knowledge in electronics and software to be able to make their own Wifi Robot. All of the source code is being released under the terms of the GNU GPL v2, so by all means, use the code, and improve it!
Hardware
Car
Adding a network camera, router, heavier batteries, extra circuits, and a
whole bunch of wires adds a lot of extra weight that the car wasn't
designed for. Because of all of the additions, you'll need to find a
pretty large RC car. Thrift stores often sell RC vehicles (without
remotes!) for $3-5. I have bought a number of cars this way for taking
apart. Vehicles in the 1:10 size ratio or bigger are appropriate; you
probably don't want to go any smaller. I bought this car for $5 at Value
Village.




I have taken apart about 20 RC cars. Nearly every single one of them used the Realtek RX2/TX2 chips or a pin-compatible alternative. The links are for their respective datasheets. What this means is that it's really easy to interface to the car's existing electronics without having to put in a bunch of our own circuitry. It's possible to hook up a microcontroller directly to these pins (Forward, Backward, Left, Right) and directly control the car. Being able to leverage the car's original circuitry saves a lot of time and effort.
Router



I've modified my WRT54GL to have 2 serial ports and a 1GB SD Card (acts like a 1GB hard drive). The SD card is not used in this project, but one of the serial ports is. One is a console port, the other is TTS/1 which we will be using. For this project I'm using Open-WRT White Russian v0.9. There are more recent versions, but we don't need the latest-and-greatest software features for this project. The software compilation guide (details later) uses this distribution, so that is why I chose it.
Later in the article links and information are given that can help you wire up your serial ports and get them working.
Microcontroller Selection



I evaluated three different microcontrollers for this project. Below is a summary of the evaluation.
Microcontroller |
PIC16F628A |
Arduino (ATmega168) Freeduino MaxSerial |
AVR Butterfly (ATmega169) |
Pros |
price |
very easy to program (C with many built-in libraries) integrated serial pre-packaged development kit, little or no soldering involved |
easier to program than the PIC (C) integrated serial little soldering involved |
Cons |
hard to program (assembly) have to wire up the circuit by hand extra serial hardware required (MAX232A) extra programmer required |
price | bootloader error (see below) integrated peripherals cause weird output voltages price |
I choose the PIC16F628A for a few reasons:
- I had a bunch of them around
- I have quite a bit of experience working with them
- I wanted a board with a small footprint, the PIC was the smallest footprint of all 3 options
- I wanted complete control over what the code was doing and this is very possible with assembly programming
I originally used the AVR Butterfly development board. It was working fine until the batteries ran low one time. There is an error in the AVR butterfly bootloader detailed here that corrupts the code and doesn't let you reprogram it unless you load a new bootloader. To me, I just knew my car was working one day and not the next. It took quite a while to debug the problem and quite a bit of time to fix it so I scrapped that control system. I also found the output voltages to be unpredictable because the outputs are also driving the integrated peripherals like the LCD screen.
Below I have included source code for the PIC and Arduino microcontroller platforms. Both have been tested -- so use whichever you feel most comfortable with. The Arduino (Freeduino MaxSerial) would be the most painless way to get running quickly. I bought this one.
Steering Circuit

I'm actually using two control boards in my car. The reason for this is that I blew the original drive transistors on the board that came with the car. Fortunately I was able to remove them and the RX2 chip (which was also blown) and salvage the steering circuit. Most of these toy RC cars have about 6 wires that go in to the steering motor assembly. This is because inside the assembly there's a metallic wiper that moves with the motor and the extra wires are used to relay which position the motor is in. Each different RC car will have a different setup for this wiper circuit, so it's VERY useful to be able to use the one that came with the car.
I blew the drive transistors because I was trying to drive the circuit at ~16V when the battery that drives the car would nominally be 9.6V. The transistors are rated for 5A, but evidentially I was driving them too hard and they failed in a spectacular plume of smoke. I took a board from another RC car and used its drive transistors. I'm running this circuit at 12V and it hasn't caused any problems. The transistors get quite hot though. Being able to use existing RC car circuits and not having to build your own H-bridges saves a lot of time and money.
Batteries

This project sucks some major battery power. I bought some high-end RC car batteries for about $50+shipping on eBay. They're 3800mAh and came with a 1.8A smart charger. They can be found with this eBay search. Each battery takes about 1.5hrs to charge (from being completely dead). They're 7.2V, however when they're just-charged they're ~8.3V and when they're dead (no longer able to move the car) they measure ~7.1V.
I replaced all of the RC battery connectors with standard ATX power supply Molex connectors. This was so that I could connect them using cheap connectors I already had and so that it would be easy to make a splitter connector for doing power measurements. The batteries are wired in series for about 16V when fully charged.
Power Rails
5V (7805 1A regulator) |
9.2V (from 12V-7812 rail) |
12V (7812 1A regulator) |
12V (LT1083 7.5A Regulator) |
microcontroller |
camera |
wifi router | drive board with motor controller |
The 9.6V rail was powered by putting 4 diodes in series with the 7812 12V rail. A diode takes ~0.7V to turn on. By putting 4 in series, we drop ~2.8V across them and now we have 9V for the devices that need less than 12V. After burning the first bunch of transistors I wanted to run the circuit at a lower voltage. The 7812 regulator is only rated for 1A but the motors would drain considerably more than that. Digikey sells a 7.5A 12V regulator for ~$14 which I bought. I attached it to a heat sink because I thought that it may get pretty hot. After quite a bit of use, it doesn't even get warn, so the heat sink was not required.
I didn't want to risk blowing the steering control circuit, so I put it on the rail closest to the original RC car battery voltage. The camera required 9V and the horn wasn't loud enough when I tried it on the 5V rail, so all of these devices are on the 9.2V rail.



All of the power electronics are on a prototype board and are stored under a project box.
Microcontroller Circuit
PIC

Arduino Hookup Guide
Signal |
Arduino Pin |
Forward |
Digital Pin 8 |
Backward |
Digital Pin 9 |
Left |
Digital Pin 10 |
Right |
Digital Pin 11 |
Green LED |
Digital Pin 7 |
Red LED |
Digital Pin 6 |
Horn |
Digital Pin 5 |
The Freeduino MaxSerial serial port can be connected with any standard serial cable to the serial port on the router.
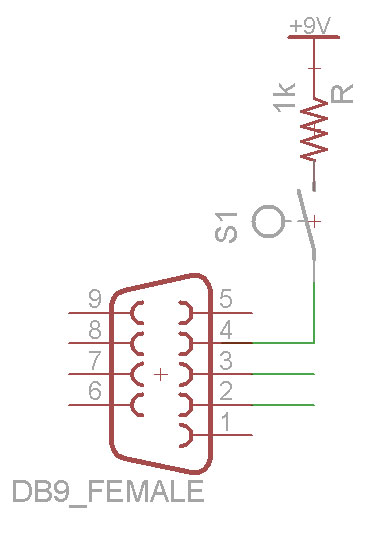
The Freeduino MaxSerial uses serial pin 4 - DTR (data terminal ready) to reset the microcontroller and allow it to download new code. Under normal PC operation this pin is either +10V or -10V depending on whether the serial port is connected or not. However, this pin is grounded on the router serial port and isn't active. When the router serial port starts sending data, the MaxSerial resets. That's no good for us. We are going to pull-up the DTR pin to +9V. With this quick hardware modification, it basically adds a program-locked mode so that new code can't be uploaded and the microcontroller can't be reset by the serial port. If you need to reprogram it, just flip the switch. +9V is a pin with easy access on the Freeduino MaxSerial.
Note: If you're using a usb version of the Arduino, you may be able to just connect the RX & TX pins to a MAX232A and then to the router serial port and may not need this modification. I only have the MaxSerial version, so I can't verify either way.
Camera


(Left Image Source: http://panasonic.co.jp/pcc/products/en/netwkcam/lineup/bl-c1/partnames.html)
One of the coolest aspects of this project is the fact that the car
can be driven without line of sight. That is accomplished using a
network camera. The one I chose was the Panasonic BL-C1A. It was
basically the cheapest wired network camera with good reviews. The software is Windows-only and isn't great, but it's usable. The software is required to get the live streaming view.
More expensive models can be had that have pan and tilt capability, but
they are considerably more expensive and I didn't need that
functionality.
Edit:
As a couple of the commentors have pointed out, the camera actually has a
very usable web interface making it not a Windows-specific device. You
can view the live feed using the following command:
http://<camera_ip>/ImageViewer?Resolution=320x240?Quality=standard
Available resolutions are 640x480, 320x120, and 160x60. Available
quality (compression) settings are precision, standard, and motion.
There's a good summary of the commands and review of the camera at this blog.

(Dimensions Images Source: http://panasonic.co.jp/pcc/products/en/netwkcam/lineup/bl-c1/partnames.html)
The video quality is quite good. However, it will often freeze at a frame for about 1 second and then start streaming again. Even with good connectivity. I'm guessing its controller isn't powerful enough to auto-focus and also keep streaming at times. Overall I'm happy with it.
See the measurements and benchmarks section below for bandwidth requirement measurements.
Looking at the inside of the camera it looks like its running on an ARM processor at 250MHz. According to their parts website, it also includes 64MB of RAM. I wonder how hard it would be to get Linux running on this thing...
Horn


I wanted to add the fun feature of being able to honk at people. It was a pretty simple addition. I bought a $3 buzzer for KW Surplus and hooked it up to the microcontroller using a transistor for greater voltage and current.
Putting it All Together



Only the base of the RC car was used. All decorative and non-functional parts were stripped off. The camera was mounted to the front with only a small modification to the mounting hardware that came with the camera. The circuit boards were bolted to the sides of the front part of the car using plastic nuts and bolts to avoid conductivity issues.
The PIC controller board was also bolted securely to the side of the car. A number of holes were drilled to allow for routing the wires. All wires were intentionally made longer than required so that the pieces could be easily moved around before they were bolted in permanently. After all of the pieces were secured, all of the slack in the wires was collected and zip-tied (see pic in Power section above). There were a lot of wires. Probably around 30 that needed to be routed to/from the front and back of the car, not including the Ethernet cable.

All of the power circuits were housed in the project box on the back of the car, with the exception of the LT1083 7.5A Regulator which is on the bottom of the car. I didn't put it in the project box because it was a late addition to the project (after blowing a board earlier), so it was the easiest place to add it. An LED on the back of the box glows red while the router is booting up. When the router sends an 'alive' message to the microcontroller, the LED turns green and I know that I'll be able to connect with the VB client application. This LED was very helpful when debugging.


All of the electronics were prototyped on a breadboard before being soldered and installed in the car. The batteries were secured using hot-glue and zip-ties. The router was a bit too wide to sit on the car without some extra modifications. I added a couple pieces of plexiglass to make the RC car base wider.
Future [Possible] Additions
There are a couple things I think would be fun to add:
Headlights, just super-bright LEDs. They would be very easy to add to the microcontroller circuit.
Current Sensor that could relay back how much current the car
was using and display it in the VB app. The microcontroller could read
the sensor and send back the data.
Software
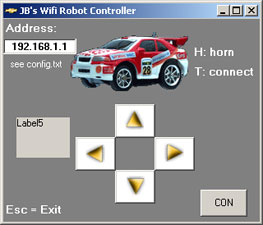
There are three pieces of software that make this project possible. The VB6 Wifi_Robot client application (runs on Windows), the CarServer which is written in C and runs on the router running OpenWRT WhiteRussian v0.9 (Linux), and the microcontroller firmware. I've provided tested firmware for both PIC16F628A microcontroller and the popular Arduino (Freeduino MaxSerial). All software is released under the GNU GPL v2 license.
The following instructions assume you have a Linksys WRT54GL with OpenWRT WhiteRussian v0.9 installed and connected to the internet. See this guide for OpenWRT installation instructions.
Installing CarServer
If you just want to use the software
SSH in to your router then ...
# cd /tmp
# wget http://www.jbprojects.net/projects/wifirobot/carserver_1_mipsel.ipk
# ipkg install ./carserver_1_mipsel.ipk
Compiling and Installing CarServer
If you want to see how it works or modify it yourself
You'll need to download the OpenWRT SDK (Linux Only) and follow this guide for compiling software: Eric Bishop's Writing and Compiling A Simple Program for OpenWRT (just follow Part I)
Makefile place in /OpenWrt-SDK-Linux-i686-1/package/carserver/
Makefile place in /OpenWrt-SDK-Linux-i686-1/package/carserver/src
carserver.c place in /OpenWrt-SDK-Linux-i686-1/package/carserver/src
Your compiled ipkg will show up in /OpenWrt-SDK-Linux-i686-1/bin/packages. Then
# scp carserver_1_mipsel.ipk root@<router_ip>:/tmp/.
to copy it to the router. SSH in and install it.
Great Resource
There seems to a free e-book on the WRT54G series of routers called the Linksys WRT54G Ultimate Hacking. I believe it's meant to be free. Google Books has the whole book viewable. It can also be downloaded here: (password: ____ ) This book outlines how to add a serial port, setup the software, as well as a bunch of other hacks.
Edit: (September 20, 2008)
I've been contacted by one of the authors. It isn't a free e-book. You can view the whole book on Google Books here or for a more convenient format and to support the authors, check it out at Amazon. It's a great book!
Getting the Serial Port Working
We need to use TTS/1, so if you only add one serial port -- make sure
its that one. Assuming you have OpenWRT WhiteRussian v0.9 installed, SSH
in to the router. The instructions in the book linked above are a bit
outdated. Here is the updated version:
# ipkg update
# ipkg install setserial
# cd /usr/sbin
# wget http://www.jbprojects.net/projects/wifirobot/stty.tgz
# tar -zxvf stty.tgz
# chmod 755 stty
Add the following lines to /etc/init.d/custom-user-startup to make
the serial port work on start-up and have the CarServer automatically
start.
/usr/sbin/setserial /dev/tts/1 irq 3
/usr/sbin/stty -F /dev/tts/1 raw speed 9600
/bin/carserver &
Running Wifi_Robot Client App:
wifi_robot_client.zip
This file contains both the VB6 source code and compiled EXE. You can just extract the wifi_robot_client.exe and config.txt
you don't want to deal with the programming stuff. The project will
open and compile in VB6 if you'd like to modify it. It's Windows-only,
but if anyone wants to make an alternative client app, I'll be happy to
post it here and give you credit. This software is just slightly
modified from the Computer Controller RC Car project posted a few years back.
Microcontroller Firmware
PIC
You'll need a PIC programmer to burn the firmware. Personally I use a
P16PRO40 that I bought on eBay. There are many pic programmers that you
can purchase or make yourself for a few dollars worth of parts. You can
compile the HEX yourself using Microchip's MPLAB or just download and program the HEX file provided. The PIC asm is based off of this PIC16F628 UART Test guide.
car_pic.asm
car_pic.HEX
Arduino (Freeduino MaxSerial)
You can follow these tutorials to get your Arduino up and running fast. The code can be downloaded to the Freeduino MaxSerial without an extra programmer.
car_arduino.c
If you're using a Freeduino MaxSerial, make sure you complete the
small hardware modification that will stop the Freeduino from resetting
every time it receives data from the router serial port. See the
hardware section above for more technical details of the problem.
Download All Files
wifi_robot_software.zip
This zip-file contains all of the compiled binaries and source code mentioned above.
Disclaimer
I have done my best to ensure to all information above is accurate. If there are any errors, please e-mail at jon@jbprojects.net
and I'll make any corrections.
Measurements and Benchmarks
Top Speed
To get the maximum speed I setup to tape lines 3m apart and filmed the
car while I made several passes. The camera records at 30fps, so I have
+/- 3.3% error from the camera and maybe +/- 1% error from the tape
lines.

The car could travel 3m in 0.7 seconds (21 out of 30 frames in 1 second).
Top Speed: 4.3m/s = 15.5km/h = 9.6miles/h

Distance
I took the router in to a big field. I could connect with my
laptop up to 500m away (at 1Mb). After that distance, I could no longer
connect. The alternative firmware (OpenWRT) allows you to increase the
output power. I tried modifying this value, but it made no difference at
all to the distance I was able to connect to it. Perhaps my laptop
(Dell Inspiron 6000) which has always had good wifi connectivity (better
than my friend's 6400), may be the limiting factor.
Data Rates
Control Signals: 3.5KB/s
Camera: 50-190KB/s
The camera used more/less bandwidth depending on how much
light was in the image. If there was lots of light, it would use more
bandwidth.
If the car was to be driven from very far away, the router would
continually negotiate a lower speed until it reached 1Mb (megabit). At
this speed, the camera wouldn't be able to send back data, but the
control signals would still be working.
Power Measurements
I noticed whenever the current changed during car bootup and noted the time. The measurements were done on the battery side before the voltage was dropped down to whatever voltage the device needed. Measurements were taken when the batteries had been used for about 10 minutes and V=15.3V. Since the current was measured here, the current going in to the device at a lower voltage would be higher. All measurements were completed with a Fluke 187 True RMS Multimeter. The last measurement noted was when the device reached a steady-state.
Camera
Time (seconds) |
Current (mA @ 15.3V) |
Current (mA @ 9.2V) |
Power (W) |
0 |
39 |
65 |
0.6 |
5 |
58 |
96 |
0.9 |
8 |
98 |
163 |
1.5 |
Router
Time (seconds) |
Current (mA @ 15.3V) |
Current (mA @ 12V) |
Power |
0 |
185 |
235 |
2.8 |
23 |
263 |
335 |
4.0 |
30 |
250 |
319 |
3.8 |
Horn
Time (seconds) |
Current (mA @ 15.3V) |
Current (mA @ 9.2V) |
Power |
0 |
40 |
66 |
0.6 |
Car
State |
Current (mA @ 15.3V) |
Current (mA @ 12V) |
Power |
Booting 0 - 23s |
Fluctuates ~400 |
510 |
6.1 |
PIC+LED, Voltage Regulators, 2 control circuit boards (no router or camera) |
102 |
130 |
1.6 |
After Booting, not driving (steady-state) |
479 |
611 |
7.3 |
Driving - Accelerating |
5500 |
7012 |
84.1 |
Driving - Constant Speed |
4000 |
5100 |
61.2 |
Note: The driving measurements aren't as accurate because it's
hard to read the multiemeter while holding a laptop to drive the car and
running down the street after the car. heh. Those numbers are accurate
+/- 0.1A.
Steering takes very little power. Once the wiper circuit detects that
the wheels have turned, it stops turning them. This happens in < 1
second.
Its been my experience that the batteries last for about 1.5hrs under normal use.
Temperature / Over Heating
From the above power measurements we can see that the transistors are driving over 7A @ 12V when accelerating. They're rated for 5A, so they get pretty warm.
The transistor temperature after 25 mins of use indoors (hence lots of
accelerating from starting and stopping and not going at max speed very
often) was 89°C. The motor was also getting pretty warm at 85°C.
When running the car outside, it doesn't seem to get near as hot.
Probably because you're driving at a constant speed more often than
inside. The transistors are rated for up to 150°C, so I think we're ok. I don't have any information on the motor though.
Project Costs
Item |
Cost* |
Car |
6 |
2nd control board (from another car) |
6 |
Router |
73 |
Camera |
115 |
Batteries |
67 |
Horn |
3 |
PIC circuit |
6 |
Misc: nuts, bolts, screws, project box, wires, connectors |
20 |
Total |
296 |
* Costs include sales tax and shipping and are rounded to the nearest dollar. Prices are in Canadian dollars.
Resources
Here are a bunch of related links that I've found informative, helpful, or interesting.
Description |
Link |
| OpenWRT, the Linux distro I'm running on the router (this page tells you how to install) | |
| WRT54G Ultimate Hacking Book | |
| WRT54G hacking site affiliated with the book | |
| Great TCP tutorials in a bunch of different languages | |
| Drive transistor datasheet | |
| 7.5A 12V regulator datasheet LT1083 | |
| Realtek TX2/RX2 Remote Control Car Chipset datasheet | |
| Pin-compatible TX2/RX2 datasheet | |
| Network Camera Information (Panasonic BL-C1) | |
| Eric Bishop's Writing and Compiling A Simple Program for OpenWRT | |
| Similar project to what I've done, but with a larger vehicle and its much slower | |
| Similar project to what I've done, but with self-built H-bridge (it overheats and stops working) | |
| MaxSerial Arduino-compatible Freeduino with a real DB9 serial port | |
| Lots of Arduino Information | |
| How-to for serial communication with the PIC16F628 |